|
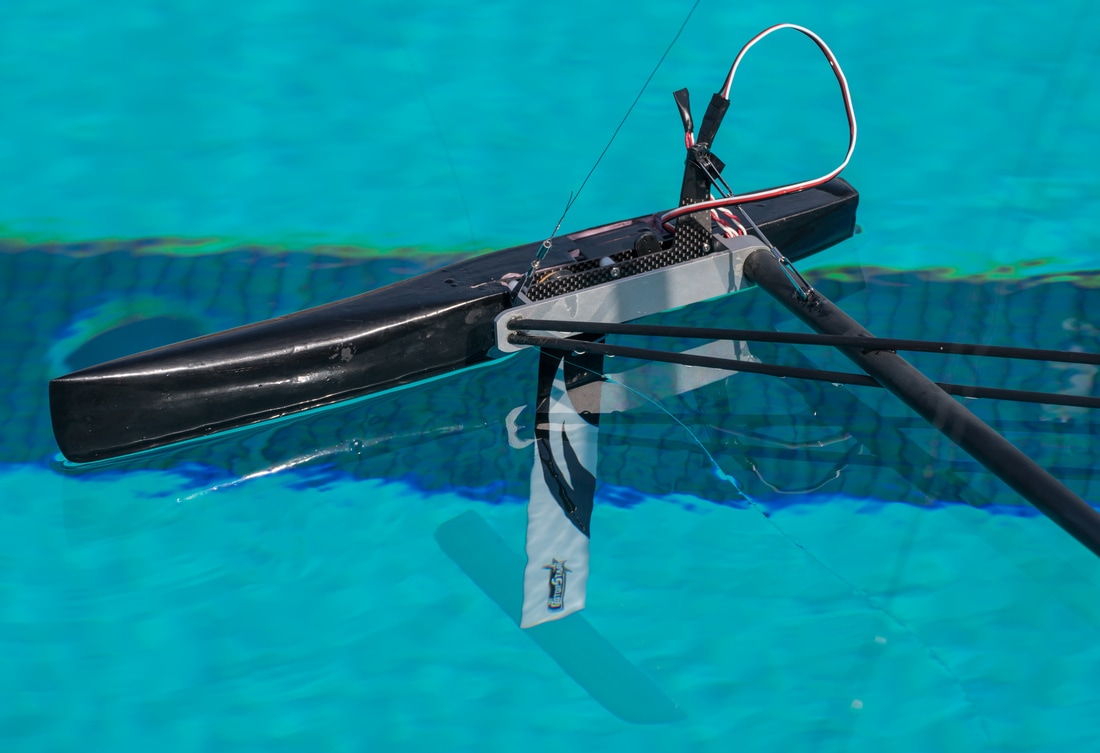
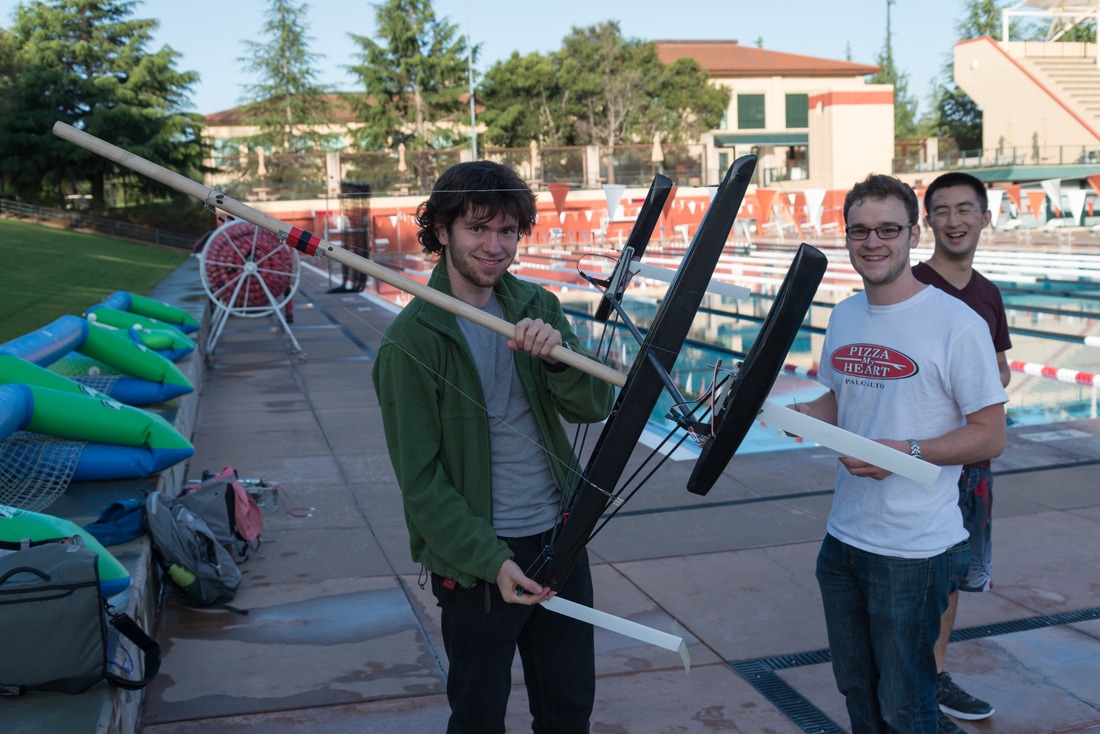
In late 2013 I joined my brother and some other friends to start a project to build an autonomous hydrofoiling sailboat. Securing funding was always a challenge and as a result this was always a side project for us. Another core member and I have now graduated, so the project will likely never be finished. Still, we did some cool stuff. We presented our progress at TedX Stanford in 2014, and at Maker Faire Bay Area in 2015. We completed several successful tow tests in 2016 as seen in the video above and the photos below.
|
The team at TedX Stanford in 2014
|




|
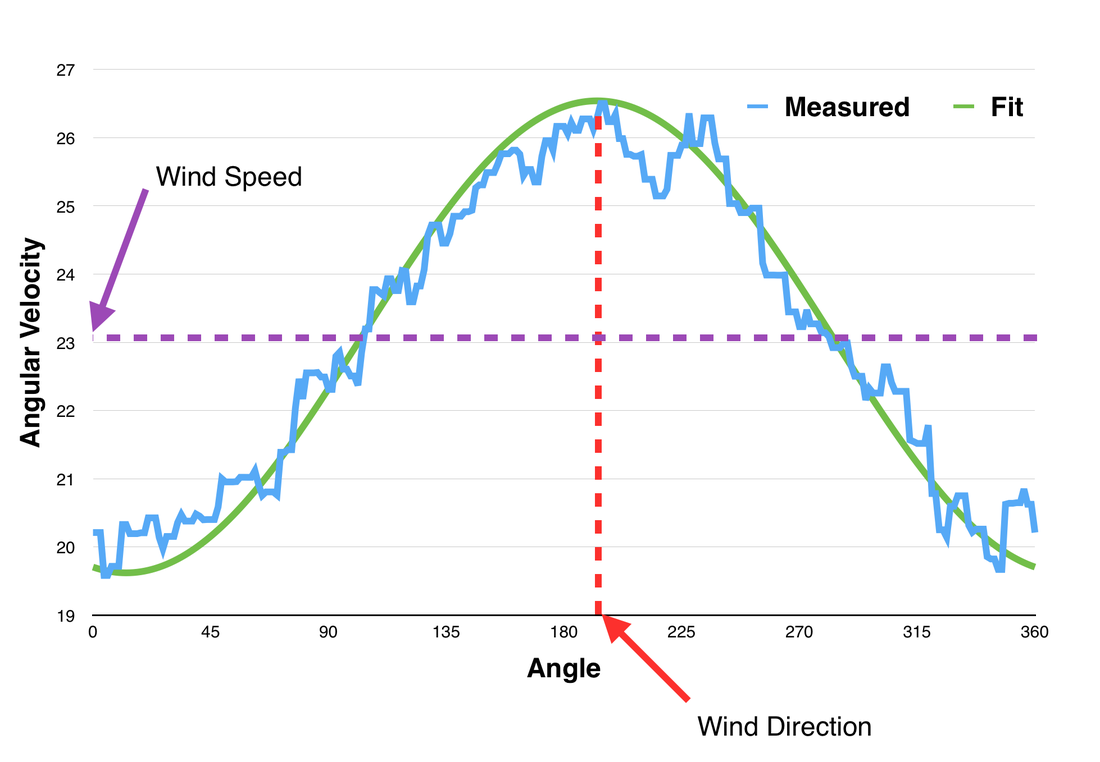
My core contributions were in software and sensor design. Notably, I designed our custom anemometer (sensor to measure wind speed and direction). My anemometer uses an asymmetric cup design. A normal spinning cup anemometer rotates with the wind. By making one cup slightly larger than the others, it will spin at a slightly different speed depending on its orientation. Using a high-speed magnetic rotation sensor, we can measure this discrepancy to also get the wind's direction. Along with our GPS and IMU measurements, this allows us to estimate the true wind speed, which is essential for route planning. This solution weighs only about 20g, far less than any existing anemometer solutions, and has only one rotating joint.
|
|